We are attempting to build an Andy Mark type climber. Can’t find any documentation on how best to attach that to the robot frame. Is there any standard guidance?
Generally you clamp the tubing around the outside in some manner. Obviously you can’t bolt through the tubes, so bolt around them.
1 Like
We used an 8020 1x2 angle vracket on ours. It works, but we are going to double it. We also may reinforce the C channel of the kit chassis where it attaches, but we need to lift it up a bit because one stage was only 58 inches fully extended. That is an easy low climb but a few inches short for the mid.
Actually, you can bolt through them. The rope exits above the bottom and the top tube does not sit that far down. We went up almost two inches. I will try to take a picture tomorrow.
We used a T gusset to clamp around the top like @Cyberphil mentions. Two pieces of black churro hold it on the sides and then we used a piece of .75” box tube to take up the rest of the space in the back, but that will be more dependent on your design.
On the bottom we just picked two holes that lined up with our frame.


I was speaking in absolutes, but we all know only sith do that.
Towards the bottom end of the larger of the tubes there is often no overlap of the smaller tubes inside. It is in these places where you can bolt through, but if that is not in-line with the COM of your robot, you are likely to rip those bolts out of the tube, or bend it from the moment applied by the robot. This is why it is recommended to pinch the tube somewhere higher up if possible when not lifting through the robot’s COM.
1 Like
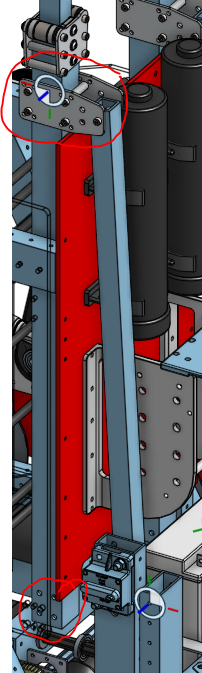
Our climber is shown. You can see both where it’s bolted (8 bolts total, a little overkill!) and where the spool is. We elected to handle the spool and motor entirely ourselves, instead of using a telescoping tube design that already had them integrated.
Note the large spacing for the bolts - that was done intentionally to give the climber stability. We don’t want the whole thing bending backwards if we drive into the bar too hard!

We extended the outer tube an additional 2" below the motor mount plates (the thickness of our chassis) to provide plenty of space for beefy lower mounting bolts. We then clamped the upper section of the outer tube to another part of our frame with a 2" square u-bolt from Ace Hardware, and printed up a spacer to distribute the clamping force - you can find it here: 2-inch Square U-Bolt Spacer by MadOverlord - Thingiverse. The included Fusion360 part is parametric so it can be tweaked if need be.
We over extended our second stage to mount 4 1/4-20 bolts to it than clamped a mount to the top for more support
We replaced the bolts in the Winch and in the Tubing Bearing with longer bolts, and used them in common to mount to our superstructure.

This topic was automatically closed 365 days after the last reply. New replies are no longer allowed.