-
********** Robot program starting **********
-
NT: server: client CONNECTED: 10.15.95.227 port 53280
-
navX-Sensor Java library for FRC
-
navX-Sensor Connected.
-
navX-Sensor onboard startup calibration complete.
-
navX-Sensor Yaw angle auto-reset to 0.0 due to startup calibration.
-
Unhandled exception: java.lang.ClassNotFoundException: edu.wpi.first.wpiutil.RuntimeLoader
-
Error at java.base/jdk.internal.loader.BuiltinClassLoader.loadClass(Unknown Source): Unhandled exception: java.lang.ClassNotFoundException: edu.wpi.first.wpiutil.RuntimeLoader
-
at java.base/jdk.internal.loader.BuiltinClassLoader.loadClass(Unknown Source)
-
at java.base/jdk.internal.loader.ClassLoaders$AppClassLoader.loadClass(Unknown Source)
-
at java.base/java.lang.ClassLoader.loadClass(Unknown Source)
-
at com.revrobotics.jni.RevJNIWrapper.(RevJNIWrapper.java:42)
-
at com.revrobotics.CANSparkMaxLowLevel.(CANSparkMaxLowLevel.java:38)
-
at frc.robot.subsystems.ShooterSubsystem.(ShooterSubsystem.java:17)
-
at frc.robot.RobotContainer.(RobotContainer.java:35)
-
at frc.robot.Robot.robotInit(Robot.java:30)
-
at edu.wpi.first.wpilibj.TimedRobot.startCompetition(TimedRobot.java:107)
-
at edu.wpi.first.wpilibj.RobotBase.runRobot(RobotBase.java:373)
-
at edu.wpi.first.wpilibj.RobotBase.startRobot(RobotBase.java:463)
-
at frc.robot.Main.main(Main.java:23)
-
The robot program quit unexpectedly. This is usually due to a code error.
The above stacktrace can help determine where the error occurred.
See https://wpilib.org/stacktrace for more information.
from: edu.wpi.first.wpilibj.RobotBase.runRobot(RobotBase.java:388)
-
Warning at edu.wpi.first.wpilibj.RobotBase.runRobot(RobotBase.java:388): The robot program quit unexpectedly. This is usually due to a code error.
-
The startCompetition() method (or methods called by it) should have handled the exception above.
-
The above stacktrace can help determine where the error occurred.
-
See https://wpilib.org/stacktrace for more information.
-
Error at edu.wpi.first.wpilibj.RobotBase.runRobot(RobotBase.java:395): The startCompetition() method (or methods called by it) should have handled the exception above.
-
[phoenix-diagnostics] Server shutdown cleanly. (dur:10|0)
-
[phoenix] Library shutdown cleanly
-
[phoenix-diagnostics] Server shutdown cleanly. (dur:10|0)
then it goes to this after a little:
-
********** Robot program starting **********
-
NT: server: client CONNECTED: 10.15.95.227 port 53290
-
navX-Sensor Java library for FRC
-
navX-Sensor Connected.
-
navX-Sensor Board Type 50 (navX-MXP (Classic))
-
navX-Sensor firmware version 3.0
-
navX-Sensor onboard startup calibration complete.
-
navX-Sensor Yaw angle auto-reset to 0.0 due to startup calibration.
-
CTR: No new response to update signal
-
CTR: No new response to update signal
-
Unhandled exception: java.lang.RuntimeException: Failed to configure Falcon 500 settings: SigNotUpdated
-
Error at com.swervedrivespecialties.swervelib.ctre.CtreUtils.checkCtreError(CtreUtils.java:11): Unhandled exception: java.lang.RuntimeException: Failed to configure Falcon 500 settings: SigNotUpdated
-
at com.swervedrivespecialties.swervelib.ctre.CtreUtils.checkCtreError(CtreUtils.java:11)
-
at com.swervedrivespecialties.swervelib.ctre.Falcon500SteerControllerFactoryBuilder$FactoryImplementation.create(Falcon500SteerControllerFactoryBuilder.java:119)
-
at com.swervedrivespecialties.swervelib.ctre.Falcon500SteerControllerFactoryBuilder$FactoryImplementation.create(Falcon500SteerControllerFactoryBuilder.java:74)
-
at com.swervedrivespecialties.swervelib.SteerControllerFactory.create(SteerControllerFactory.java:20)
-
at com.swervedrivespecialties.swervelib.SwerveModuleFactory.create(SwerveModuleFactory.java:32)
-
The robot program quit unexpectedly. This is usually due to a code error.
The above stacktrace can help determine where the error occurred.
See https://wpilib.org/stacktrace for more information. -
at com.swervedrivespecialties.swervelib.Mk4SwerveModuleHelper.createFalcon500(Mk4SwerveModuleHelper.java:73)
-
at com.swervedrivespecialties.swervelib.Mk4SwerveModuleHelper.createFalcon500(Mk4SwerveModuleHelper.java:103)
-
The startCompetition() method (or methods called by it) should have handled the exception above.
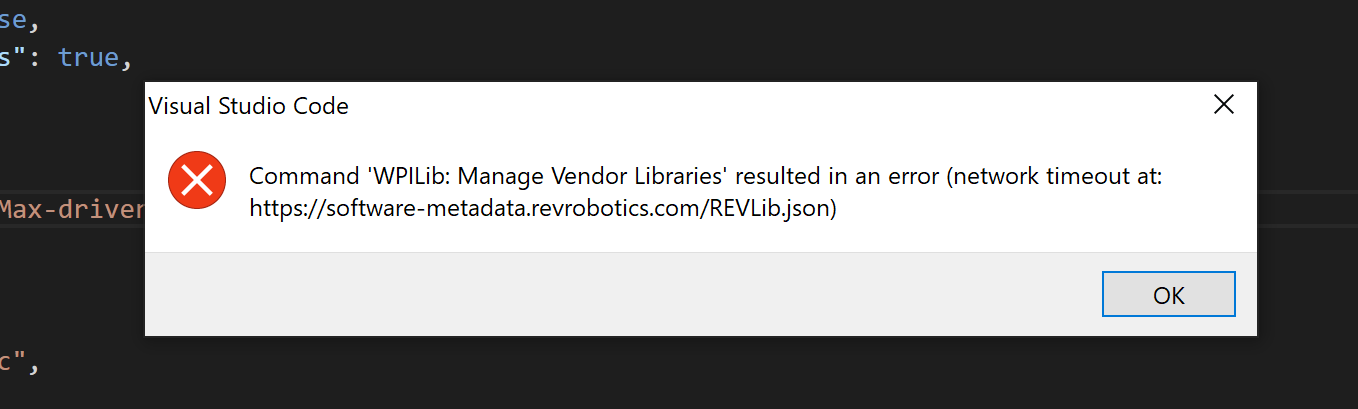
I think I have all of the right vendordep and they are all updated. Whats going on?