What brand wheels are you using (and/or did you make those omnis)? Are you using FIRST trannys or are you using the same 2-speed one you used last year?
How long does it take the shooting wheel to spin up? Can you vary the speed to change the height of the ball’s trajectory?
What material is on your rollers? Mousepad works superbly well. We used mousepad and pneumatic tubing.
I’d like to see it if I get back to Merrimack anytime soon.
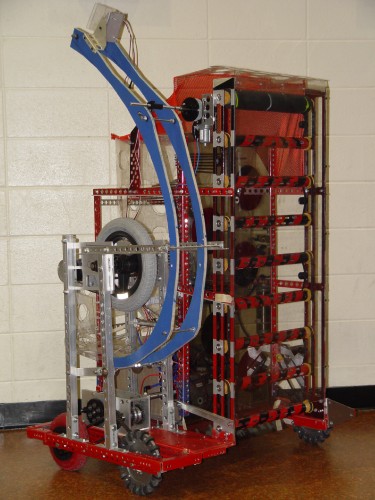
Not sure about the rear red wheels, but we bought the front two wheels from Andy Mark.
Unfortunately, it takes quite a while to get the launch wheel going. I’m thinking of ways to get that better while still being underweight
The rollers are all aluminum except the top which is wrapped in pipe insulation so it has a wider diameter for giving the balls enough push to get them into our storage, it’s very similar to mousepad material
We didn’t use the two speed transmissions last year, but we are this year
Oh cmon that wheel gets up to speed pretty quick considering the software behind it to make it maintain constant speed. Also you cant quite tell from the picture but we have a spiral holding tank made of aluminum rods and a core with a helical hole patern. the holding tank alone holds 15-16 balls, plus whatever floats above that are held down by the “net” which is actually made of a few pinnies that Mr. George had I guess… who knows if they’re used… on top of that is however many balls we fit in the gatherer. I’d estimate that at max capacity we could probably hold… oh maybe 20-25 balls? we also have a rather nifty crosshair system that allows the copilot to more precicsely aim the shooter. And to assist the co-pilot we have a revolutionary “flex drive” to aim the two rails a bit in either direction. the two speed tranny works great, and its been tweaked since you and Ii used it in '03, nate. high gear is higher and its a little bit lighter. We also made some really cool feet but due to weight we didn’t install them… and those omni wheels really do dig into the carpet for superior traction in the drive diection with low friction in the turning direction so it drives rather nicely. See you guys at Nationals!
Software didn’t get enough integration time to get the wheel moving at different speeds. So, they’ll be working on that at the regional
It’s not video feed. It’s a graphic cross hair on the laptop we are bringing to the drive station. There is a little box that indicates where the goal is in relation to where the shooter is pointing. If the green dot is where the two hairs meet, then we will hit the target.
There was some Patriot influenced design. The storage was originally the same idea Patriot had with the angled shelves. After mocking that up we found that the balls easily got stuck and we changed it to a spiral.
Nothing to do with Avagadro (I had to google it to remember what avagadro’s number was) or sensors. The refresh time for our code is 40x per second, or 0.025 secs.
will someone on 166 please forward my name and email to someone at BAE or Nashua. I do not have a contact for anybody, and would love to get back with my former team as a mentor.
 on top of that is however many balls we fit in the gatherer. I’d estimate that at max capacity we could probably hold… oh maybe 20-25 balls? we also have a rather nifty crosshair system that allows the copilot to more precicsely aim the shooter. And to assist the co-pilot we have a revolutionary “flex drive” to aim the two rails a bit in either direction. the two speed tranny works great, and its been tweaked since you and Ii used it in '03, nate. high gear is higher and its a little bit lighter. We also made some really cool feet but due to weight we didn’t install them…
on top of that is however many balls we fit in the gatherer. I’d estimate that at max capacity we could probably hold… oh maybe 20-25 balls? we also have a rather nifty crosshair system that allows the copilot to more precicsely aim the shooter. And to assist the co-pilot we have a revolutionary “flex drive” to aim the two rails a bit in either direction. the two speed tranny works great, and its been tweaked since you and Ii used it in '03, nate. high gear is higher and its a little bit lighter. We also made some really cool feet but due to weight we didn’t install them…  and those omni wheels really do dig into the carpet for superior traction in the drive diection with low friction in the turning direction so it drives rather nicely. See you guys at Nationals!
and those omni wheels really do dig into the carpet for superior traction in the drive diection with low friction in the turning direction so it drives rather nicely. See you guys at Nationals!