2582 the PantherBots are proud to continue as an Open Alliance team for the 2024. We have been benefitting off of the content created and shared by other teams for many years. Last year was our first year as an Open Alliance team and we hope sharing our experience was a benefit to the community. We know that the feedback we received from the community during our season was certainly a benefit to our team.
We plan on providing updates multiple times a week during build season and we will share our code, CAD, and will be happy to answer any questions.
The following are the goals the team decided on and the metric we will utilize to see if we have archived the goal if it is not self-evident.
Minimum
Pass on knowledge to incoming students and other teams
→ Proficiency in knowledge of tools, equipment, processes. Team lead reviews, self-assessment survey (beginning and end of year), Team interaction at events and through social media/blogs
Have a safe workspace, both as in no injuries and a welcoming environment
→ Recorded injury/near miss log and end of year survey
Be an alliance captain or 1st pick at all of our district events
Qualify for the FiT district championship
Submit award essays for Dean’s List and Woody Flowers
Exhibit Gracious Professionalism during team meetings and the heat of an event
Win an award at our both district events
Improve time management
→ Document processes with engineering workbooks and build blog
→ Develop plan pre kickoff (update at kickoff) with key milestones
[More detail in later post]
Post at least weekly and update this Open Alliance Blog
Glitter the world
→ Make and distribute at least 200 lucky dust bottles per district comp
Pretty purple powder coated robot
Maintain clean organized pit and workshop
→ Leads checkoff nightly
Do not beat ourselves in any match (No bad batteries, incorrect robot configuration, starting without charging air…) Drive Team, Pit Crew to have known responsibilities at events and practice, written checklist
→ Post competition review sessions
Be a finalist at least one of our district events
Realistic
Raise $10,000 in new sponsorships/fundraiser ideas
Increase social media following
→ 750 followers IG, 500 FB
→ 2500 average views on a videos
Be an alliance captain/1st pick at FiT district championship
Refine current real time scouting system/app
Qualify for FIRST Championship
Win judged award at FiT district championship
Stretch
Raise $15K
Win a Blue Banner
Make it on to an elimination alliance at FIRST Championship
Finalist at FiT District Championship
Develop sustainability plan to provide to judges
5000 views on a team video
As for the breakdown of Minimum, Realistic, and Stretch how we tried to delineate them. Some kind of fall between categories, but we tried to place them where most of the team felt they should be. Minimum - The team feels that if should be able to achieve these goals. We have achieved similar goals in the past and would be a little disappointed if we do not accomplish them. Realistic - The team feels that if we focus and do all of the work we need as a team we can realistically achieve these goals, but we may not have as much direct control on outcomes. Stretch - The team thinks these are in reach, but we will likely need some outside help and a little luck to achieve
Some Geometry Analysis for Optimum Speaker Launch Location
We were interested in the optimum height and distance to launch the note into the speaker, and to determine how much harder it would be to effectively make a longer shot.
We did a simple calculation that determines the angle between the top and the bottom opening of the speaker.
You can see very near the subwoofer a high release gives a larger angle, but at further distances away a lower height allows for a larger angle variance. Of course, a lower release would be easier to defend. (ahh tradeoffs)
No bumper gaps bigger than 1/2. If you are near full perimeter be sure to weigh bumpers before comp. they will be pushing the bumper weight limit.
One note at a time (don’t get a game piece stuck in your robot)
Notable Comments from Strategy Discussion:
From student bot simulations (full size court students simulating the game and walking the path of a robot):
Melody ranking point will be rare until later in season
Lots of communication and timing is needed to get the most out of amplified state
Point totals can be higher if partners wait to coordinate amplified scoring, but often led to lower overall game piece count scored (more likely to win, less likely to get melody RP)
Auto points and amped points are huge
The trap is probably well named, but will likely get you an RP on most matches if completed
Someone playing D between the speaker and stage can really muddy things up
After having Sunday to reflect on our rules and strategy meeting we discussed what capabilities the robot needs to reach our seasons goals.
We break it into three categories must haves, wishes, and will not have.
Must haves we will design around, wishes if it happens to fit into our design and timeframe great, but is lower on the priority list and will not compromise achieving the musts to accomplish. Will not have - pretty self explanatory.
We discussed over bump and under bumper and developed a few sketches. We looked at some swerve note savers or as if have dubed them “autotune” to keep you from having bad notes. That are rings that go around the swerve to keep them from chewing up the note.
We powder coated and assembled a kitbot superstructure. We are new to power coating and had two students learn a new skill. We also had quite a few more get more familiar with our CNC and assembly.
We will attach this to our swerve drive base from last year to have a bot our drivers and programmers can play with until our design is complete.
Prototyping
Intake
We are thinking of going with the “Undertaker” style that 95 & 3847 discussed in their build blogs. It essentially extends your fame perimeter and wraps a bumper around your permanent intake. We the number of intakes we have destroyed over the years this is very appealing.
You can see in the video it works great in the center, but what you can’t see and I don’t have a video is that when the note comes in near the edges it gets hung on a swerve module. We tried some cardboard funneling ramps and a few other things, but we have not found a solution we love yet. I think we are going to add a second set of rollers to pull the note a little higher and see how that works, possibly some wheels horizontal to the floor to pull the notes toward the center.
Note Savers
We printed a demo of the swerve shields. We have not tried to drive on it, but one thing is obvious is that with very low shields (3/8" off the ground) it would not take much of an obstacle to lift the wheel off the ground and to get stuck. I think running over a node on the other side of the bot might lift this wheel off the ground enough where you could not drive away. If we use something like this it will be a bit more ground clearance.
The most successful launcher we tried was a roller over the top and bottom with a lot of 2.5 Colsen wheels similar to what 2881 showed in their build blog. and we will likely go with something in that arrangement.
We still have a little bit to go before we decide on a final architecture, but hopefully we can do some prototyping on the trap mechanism now that we have our field built.
Game Field
Speaking of game field we have completed the team versions of the field and set up our practice area. We have about 1/3 of a field in an old tractor repair shop at our school that we can use during build season.
This year we are selecting drivers by the beginning of next week so they will have all season to practice. We have some tough decisions to make within the next day or so. We had quite a few veteran team members drive at off season events, and a few newcomers to the team try out this week. I think the good news is we have a lot of quality candidates, but the bad news is we will have to whittle it down to the final group so they will get as much stick time as possible before our events.
Not sure if it will do a good job of funneling the note to the middle or if it will just make a ramp that makes the robot drive up onto the note. If the weather holds up we will try to test this out soon.
This makes a relatively simple speaker and amp mechanism but doesn’t have the drawback of a long arm exposed outside the frame perimeter.
We will be playing with some ideas we have for trap mechanism with it, but if we come up short, we will either use the arm to climb or add some COTS telescoping climbers.
Weather has cancelled our meeting tomorrow as well so we will just be working on cad and refining some drawings for trap prototypes that we can test when we meet again.
Some testing of the under bumper intake. It looks like the strange bumper geometry does a good job of funneling the note toward the middle in our limited testing.
KitBot is complete and swerving. Here is our first kinda cycle. Still have some work to do, but it is good to have a base for our drivers and programmers to start working with while our comp bot is being designed and manufactured.
We had a good opportunity to practice some of our new manufacturing and finishing. We just recently had our newly purchased powder coating oven arrive and it is finally wired and working.
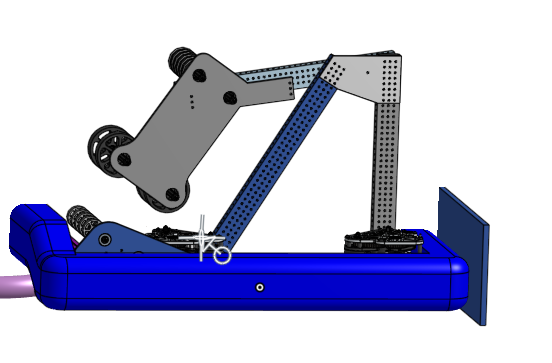
We are mostly set on a design. Still working on a good trap mechanism. This view shows the backup plan which should be able to climb with bumpers touching the column of the stage
Manufacturing
We are currently cutting a lot of tubing and will be drilling it and powder coating in the next few days.
Doesn’t the bumper cutout like that mitigate a lot of the benefit of having a full-width front intake? Why not make the bumpers raise up on the side before coming around to the front?
The reason we are looking at the bumper like this is that in our initial testing if we pulled a note up on the edge of the intake it would jam and really scar up and damage the note.
We found of the note was a bit more centered it went through nicely.
This bumper cutout forces the note towards the center where it plays nicer with our intake.
Our testing looks like this bumper will funnel most all notes hit with that side of be bumper in even if swishing against wall.
That does make sense if it helps the intake not get clogged. Any worry about approaching a note quickly, being slightly misaligned, and pushing the note away from you after it bounces off of the covered section of your intake?