Kickoff
UPS was happy to get our season kicked off this past Saturday with a marathon meeting lasting from 9AM - 8PM. This overall purpose of this meeting was to align on team goals for the year and determine the strategy in how we want to approach the game.
Prior to game reveal
Before the kickoff stream went live, the team spent some time working through a SWOT (Strengths, Weaknesses, Opportunities, Threats) for our team in support of drafting year-long goals that we will be working towards.
The summary of that discussion can be seen here:
Overall, we have a strong base of mentors and our programming team in particular is experienced and eager for a challenge. Weaknesses lie in access to our build space being limited and our primary precision manufacturing device being out of commission and assumed to be unavailable to us for build season.
This will force some design decisions and require outsourcing of parts manufacturing that may delay our final build… TBD.
From here we drafted a set of goals that were discussed and ultimately finalized in the Monday evening meeting.
Our final season goals are documented here: (1) 2024 Team and Robot Goals - Google Sheets
We have 2 goals specifically related to our robot design and strategic plan for this year:
- Rank in the top 33% of scorers at at least one of the regionals we attend.
- Work towards winning an autonomous award
The additional goals outlined were:
- Increased student participation in open alliance
- Meeting specific deadlines for CAD, manufacturing and robot construction and integration
- Improving pit readiness in both basics required for robot repair/maintenance as well as talking to judges and teams about our design decisions
Game Reveal and Strategy Discussions
During the kickoff stream we played a fun game of bingo (complete with prizes) to keep students engaged an focused on the content. We then split into groups to do a quick overview of key parts of the manual (in particular, scoring and ranking, penalties, and general game flow).
After reviewing the game manual we broke into 2 groups to approach breaking down the game opposite sides.
Group 1 - Robot Sketching
This group dove right in to coming up with ideas for robots and mechanisms that might be useful to play this game. They presented ideas to the other members of this group to allow ideas to play off of each other.
Using the multiple designs that were proposed, the group found commonalities amongst the designs that were well liked in order to determine a list of robot functions they felt were most critical to playing the game.
The summary of the high priority robot functions from this group were:
- Score in Amp
- Score in Speaker
- Pick up Notes off Ground
- Drive under stage
Group 2 - Robot Strategy
This group took a higher level approach to breaking down the game, with listing out all of the scoring opportunities, followed by all of the things a robot might do in the game.
From here the group looked at robot archetypes that we could expect to see across the competition, and then began to theorize on how these types of robots would rank and what other robots they might want on their alliances.
High Level Design Decisions and Tradeoffs
After the two groups finished their discussions, we came back together as a team to align on how we want to approach this game to achieve the goals that we have laid out.
To accomplish this we went through our list of robot tasks and broke them into 4 categories:
- Must have - Need this functionality to accomplish our team goals for the year
- Should have - Secondary improvements that we’d like to have in place by our second regional
- Could have - Stretch goals/happy accidental functionality that we’re going to spend a lot of time or effort working towards.
- Will not - functions we will spend no time developing or thinking about
From here we align priorities in the “must have” category to understand where trade-offs might need to be made as the design is fleshed out.
Design Decisions and Logic:
After some spirited discussions and debate the team aligned on the following robot functions that we are targeting for our design, in priority order.
- Drive (1)
- Hold Note (1)
- Pick Up Note from Ground (1)
- Place Note in Amp (2)
- Shoot Note in Speaker (3)
- Drive under Stage (4)
Picking up notes from the ground and scoring in the amp and speaker were found to be critical to meet our team goals of both maximizing our scoring output as well as maximizing our autonomous scoring.
We felt that being able to score in both the amp and speaker were critical to any alliance, as an amplified note is basically worth 2.5 cycles compared to a non-amplified speaker-scored note.
We thought that driving under the stage will be a massive advantage towards pathing and shedding defenders, but we are willing to sacrifice this if needed to make sure we have highly effective amp and speaker mechanisms.
Probably the most controversial decision was around the hang. Although we do see this as critical to ranking highly at the competition, the total values of the climbs are quite low this year, and we ultimately came to the conclusion that climbing may not even be happening in the playoff rounds. We feel that being a consistent high scorer will be more valuable in an elimination alliance. We’re confident that if we execute on this design we’ll be an appealing alliance partner. We also feel that we could find a simple solution to hanging if we find that we have the space on the robot after our scoring mechanisms are finalized.
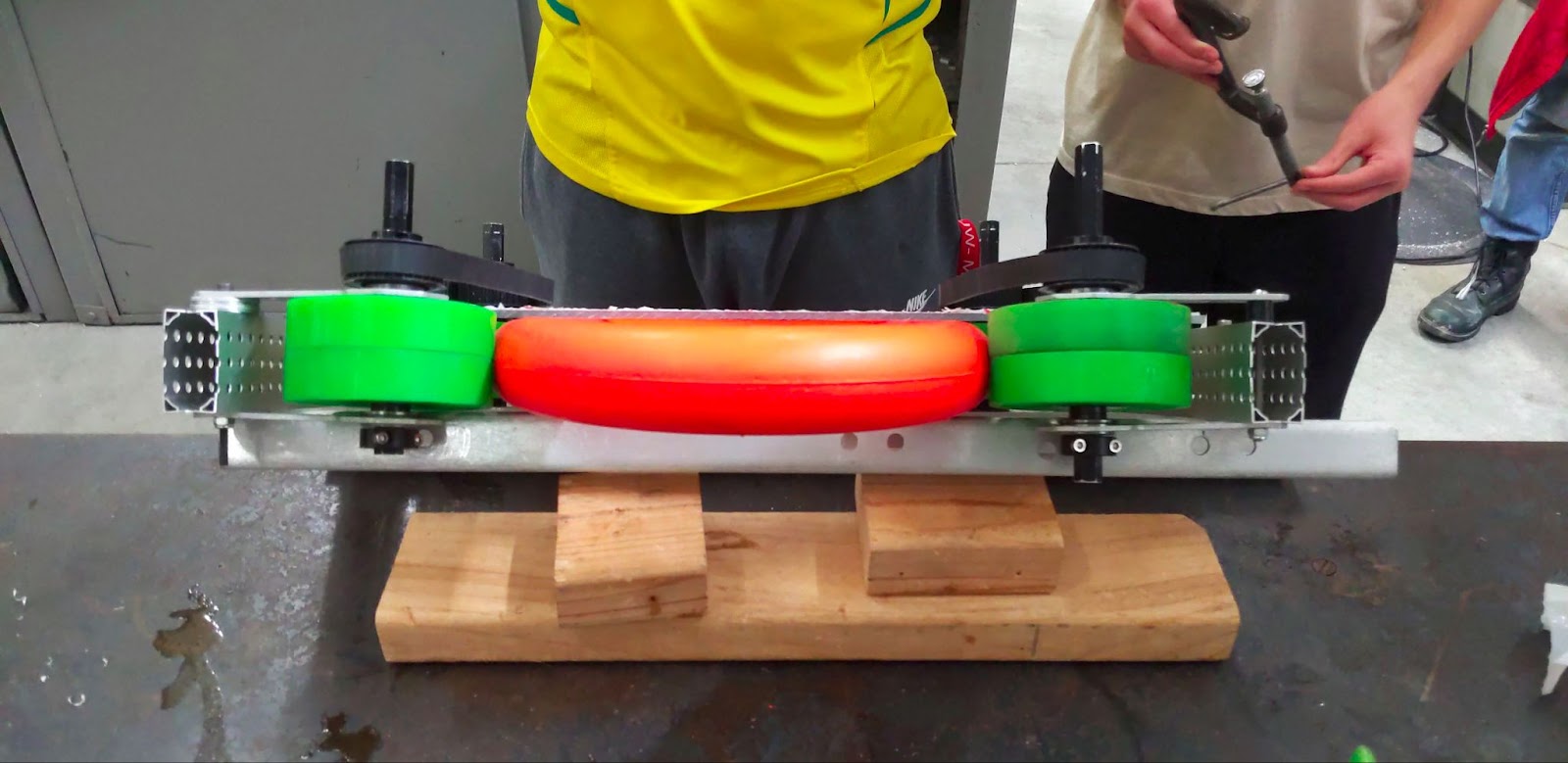
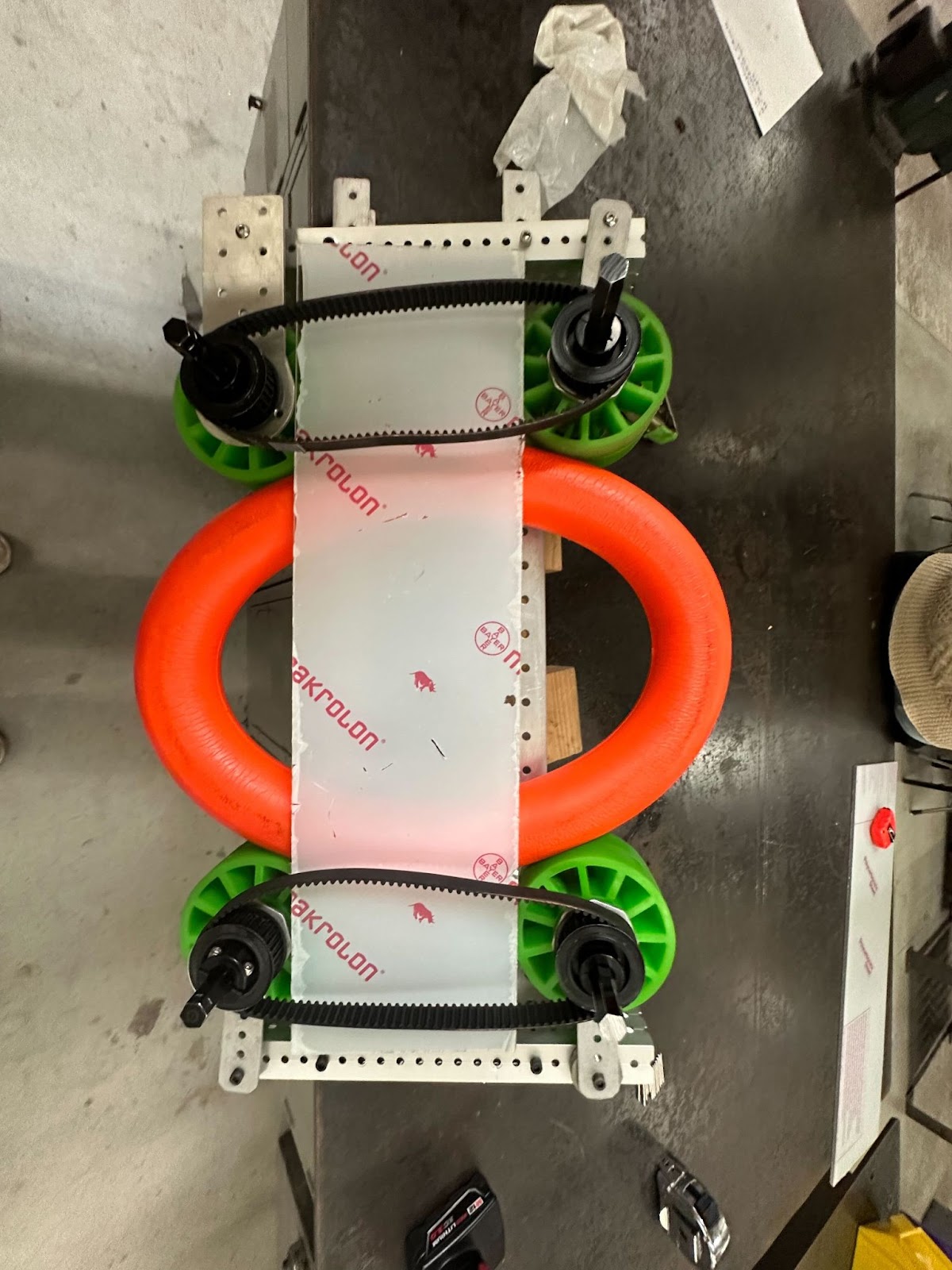
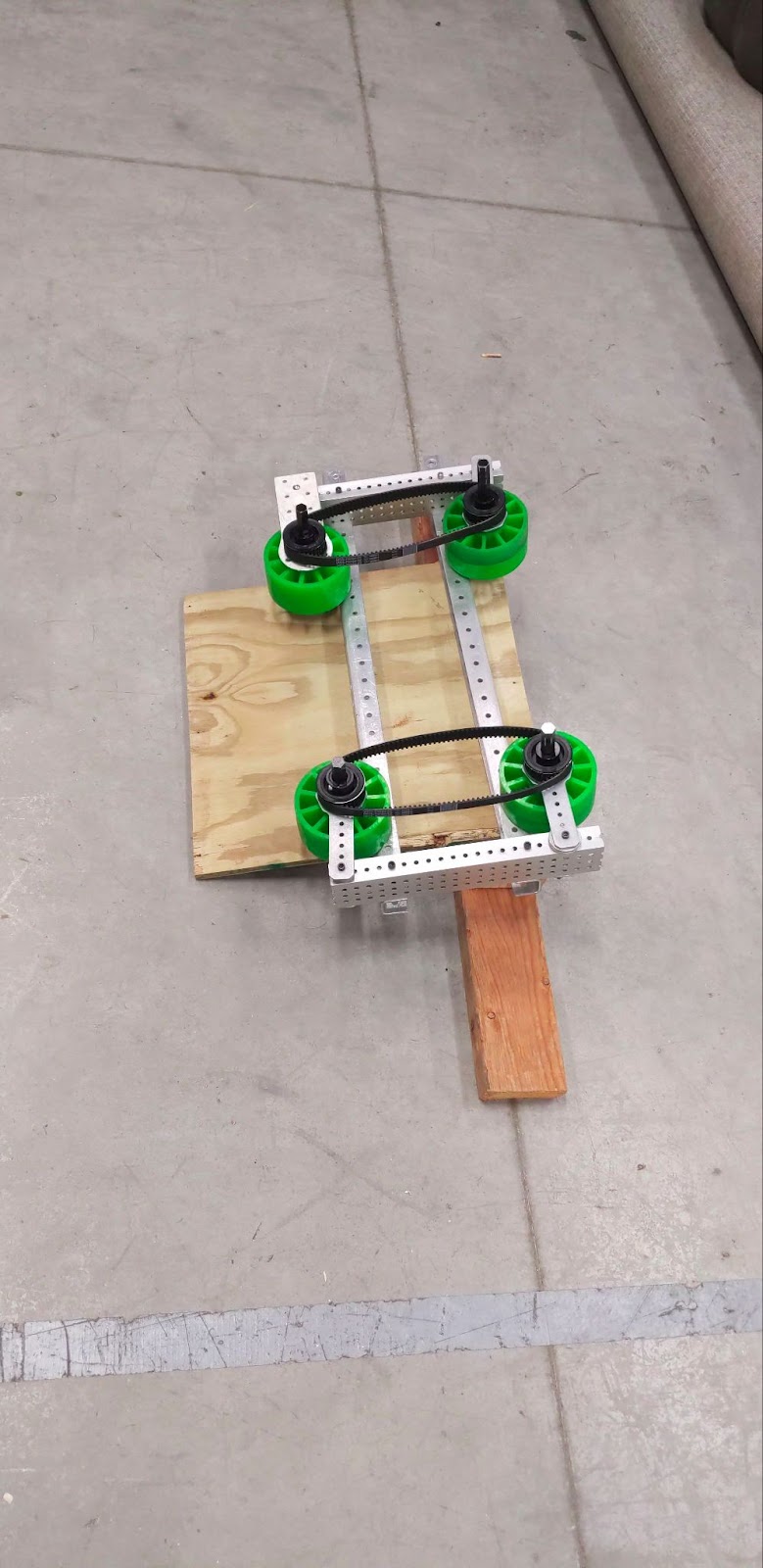
Initial Geometry Investigations
With these goals in mind, our designers have begun to look at some of the geometry and limitations that these might entail.
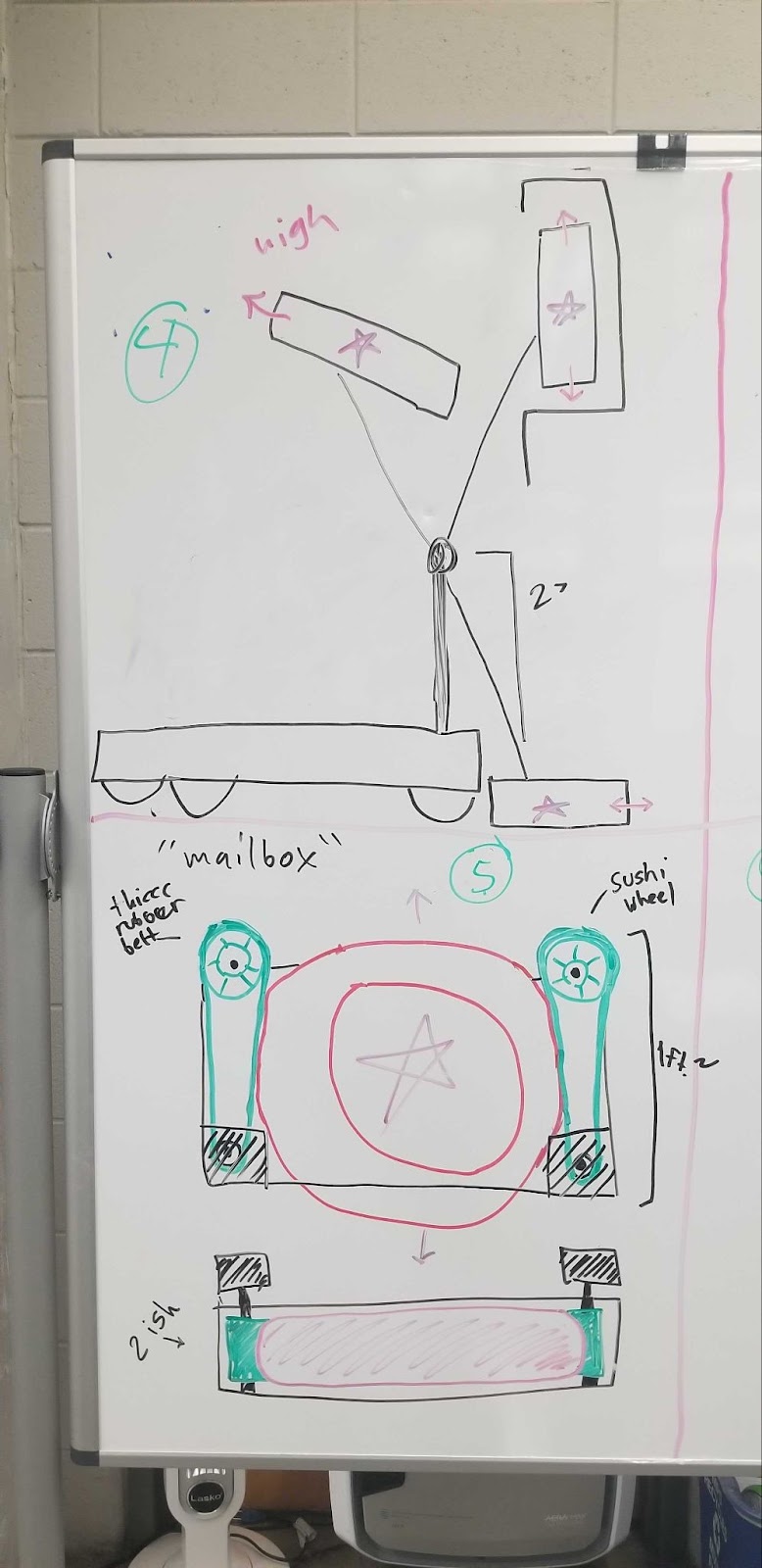
Intake arm with pass-through (we’ve been calling this the mailbox concept) for scoring in the amp:
Under-bumper intake with static angle shooter:
Over-bumper with pass-off to static shooter:
Conclusion
Overall, I think this was a very successful kickoff. We had a lot of great engagement and came up with a strategy that should be both effective and within our means to accomplish.
Next up: Prototyping and CAD v1
Until next time!